Roncsolásmentes kutatási csomag I. A légirepülés
Ezzel a bejegyzéssel szeretnék útnak indítani egy sorozatot ami bemutatja, hogyan is működik az a roncsolásmentes régészeti kutatási csomag amivel a BORBAS projektben felmérjük a bronzkori településeket. A bejegyzések egy részét azok a szakemberek készítik, akik részt vesznek a projektben. Tervezem, hogy a szakszerű bemutatások után “laikus” régészként a saját meglátásaimat is hozzáfűzöm külön bejegyzésként a leírásokhoz. Álljon itt most az első módszertani bemutatás a légifényképek készítésének általunk alkalmazott módjáról.
Merevszárnyú robotrepülők segítik a bronzkori településkutatást
Balogh András, Pazirik Informatikai Kft.
 A robotrepülők rohamos fejlődése a régészet számára is egy új korszakot hozott a légi régészeti kutatások területén. Korábban az archeológiai kutatásokban is megkérdőjelezték ezeknek az eszközöknek a tudományos hasznosulását. Ma már azonban ezek az eszközök – számos más tudományterülethez hasonlóan – a régészetben is kiválóan és rendkívül sokrétűen használhatóak és az általuk költséghatékonyan előállított adatok a legújabb képfeldolgozó szoftverek segítségével gyorsan és hatékonyan kiértékelhetőek. Ennek egyik pozitív példája a 2013.10.19-én merevszárnyú RPAS-el (Remotely Piloted Aircraft System – Távirányított Repülő Rendszer) végzett felmérésünk, melynek során 3 bronzkori földvár került berepülésre. A munka alatt azonban nemcsak
A robotrepülők rohamos fejlődése a régészet számára is egy új korszakot hozott a légi régészeti kutatások területén. Korábban az archeológiai kutatásokban is megkérdőjelezték ezeknek az eszközöknek a tudományos hasznosulását. Ma már azonban ezek az eszközök – számos más tudományterülethez hasonlóan – a régészetben is kiválóan és rendkívül sokrétűen használhatóak és az általuk költséghatékonyan előállított adatok a legújabb képfeldolgozó szoftverek segítségével gyorsan és hatékonyan kiértékelhetőek. Ennek egyik pozitív példája a 2013.10.19-én merevszárnyú RPAS-el (Remotely Piloted Aircraft System – Távirányított Repülő Rendszer) végzett felmérésünk, melynek során 3 bronzkori földvár került berepülésre. A munka alatt azonban nemcsak  merőleges tengelyű felvételek születtek, hanem elkészült a digitális állomány utófeldolgozása is. Az új fotogrammetriai eljárások segítségével ezekből a merőleges- vagy ferdetengelyű felvételekből nagy pontosságú digitális terepmodell (DTM) is készíthető.
merőleges tengelyű felvételek születtek, hanem elkészült a digitális állomány utófeldolgozása is. Az új fotogrammetriai eljárások segítségével ezekből a merőleges- vagy ferdetengelyű felvételekből nagy pontosságú digitális terepmodell (DTM) is készíthető.
Adatgyűjtés
 A légifelvételek készítésére merevszárnyú RPAS eszközt használtunk, mellyel nagy terület feltérképezése lehetséges. Az eszköz egy kifejezetten FPV (First Person View) repülésre tervezett Skywalker típusú modellrepülőből és az ezt kiegészítő összetett rendszerekből áll. A repülőgép működését egy magyar fejlesztésű C4S típusú robotpilóta rendszer segíti, mely több repülési módot tud (szabad kézi repülés, stabilizált repülés, útvonal repülés, RTH, adott pont körüli körözés, stb.). A felmérés során a szabad kézi repülést és az előre beprogramozott útvonal repülést használtuk. A vizsgálni kívánt terület kijelölése után a robotrepülőhöz biztosított program automatikusan megtervezi a repülési útvonalat, mely különböző beállítási lehetőségek segítségével még pontosabban személyre és adott feladatra szabható (repülési magasság, repülési sebesség, fényképező beállítási lehetőségei és annak paramétereinek megadása).
A légifelvételek készítésére merevszárnyú RPAS eszközt használtunk, mellyel nagy terület feltérképezése lehetséges. Az eszköz egy kifejezetten FPV (First Person View) repülésre tervezett Skywalker típusú modellrepülőből és az ezt kiegészítő összetett rendszerekből áll. A repülőgép működését egy magyar fejlesztésű C4S típusú robotpilóta rendszer segíti, mely több repülési módot tud (szabad kézi repülés, stabilizált repülés, útvonal repülés, RTH, adott pont körüli körözés, stb.). A felmérés során a szabad kézi repülést és az előre beprogramozott útvonal repülést használtuk. A vizsgálni kívánt terület kijelölése után a robotrepülőhöz biztosított program automatikusan megtervezi a repülési útvonalat, mely különböző beállítási lehetőségek segítségével még pontosabban személyre és adott feladatra szabható (repülési magasság, repülési sebesség, fényképező beállítási lehetőségei és annak paramétereinek megadása).

A repülést a gépen elhelyezett kamera és videó adó segítéségével, valamint a földön elhelyezett videó vevő segítségével folyamatosan nyomon követhetjük, kontrollálhatjuk. Az élő kép segítségével a felmérés során kint lévő szakemberek is pontos megfigyeléseket végezhetnek, beleszólhatnak az eszköz útvonalába is. A feladat végrehajtása automatikus, a robot végzi, de bármikor megszakítható vagy korrigálható az adott útvonal. A nagyobb távolságok berepülésében egy úgynevezett LRS rendszer (Long Range System) is segíti a pilótát.


Segítségével ezeknek az eszközöknek az irányítható hatótávolsága akár 5-10 km távolságra is biztonságosan kiterjeszthető. Az RPAS eszköz repülési ideje 40-60 perc között van, de akkumulátor csere után tovább folytatható a repülés. A felmérés során ez a repülési idő elég volt, hiszen mind a 3 helyszín esetében közel tudtunk menni a lelőhelyhez, így nem kellett a célpont eléréséig nagy távolságokat megtenni.
A repülőgép testében, a felszínhez képest közel merőlegesen elhelyezett fényképezőgép került, mely adott időközönként készített egy-egy felvételt. Az így készült közel merőleges tengelyű felvételek kerültek később feldolgozásra és kiértékelésre. A légifotók készítése során figyelnünk kellett arra, hogy a felmért objektumról készült képek között megfelelő átfedés legyen, hiszen annál jobb eredményt fogunk elérni, minél nagyobb az átfedés.
Az FPV repülőgép számára nem szükséges nagy fel- és leszálló pálya, kis helyen is képes ezeket a manővereket végrehajtani. Repüléseink során mind a 3 helyszín környékén sikerült olyan területet találni, ahol ezt biztonságosan meg lehetett tenni. Szerencsére az időjárási viszonyok is megfelelőek voltak, viszonylag szélcsendes és napfényes idő volt, így az elkészült felvételek jó minőségűek lettek.
Tapasztalataink szerint egy nap 2-3 bronzkori földvár is kényelmesen felmérhető, de ez függ a terület nagyságától és az egymáshoz viszonyított távolságuktól is.
Képfeldolgozás
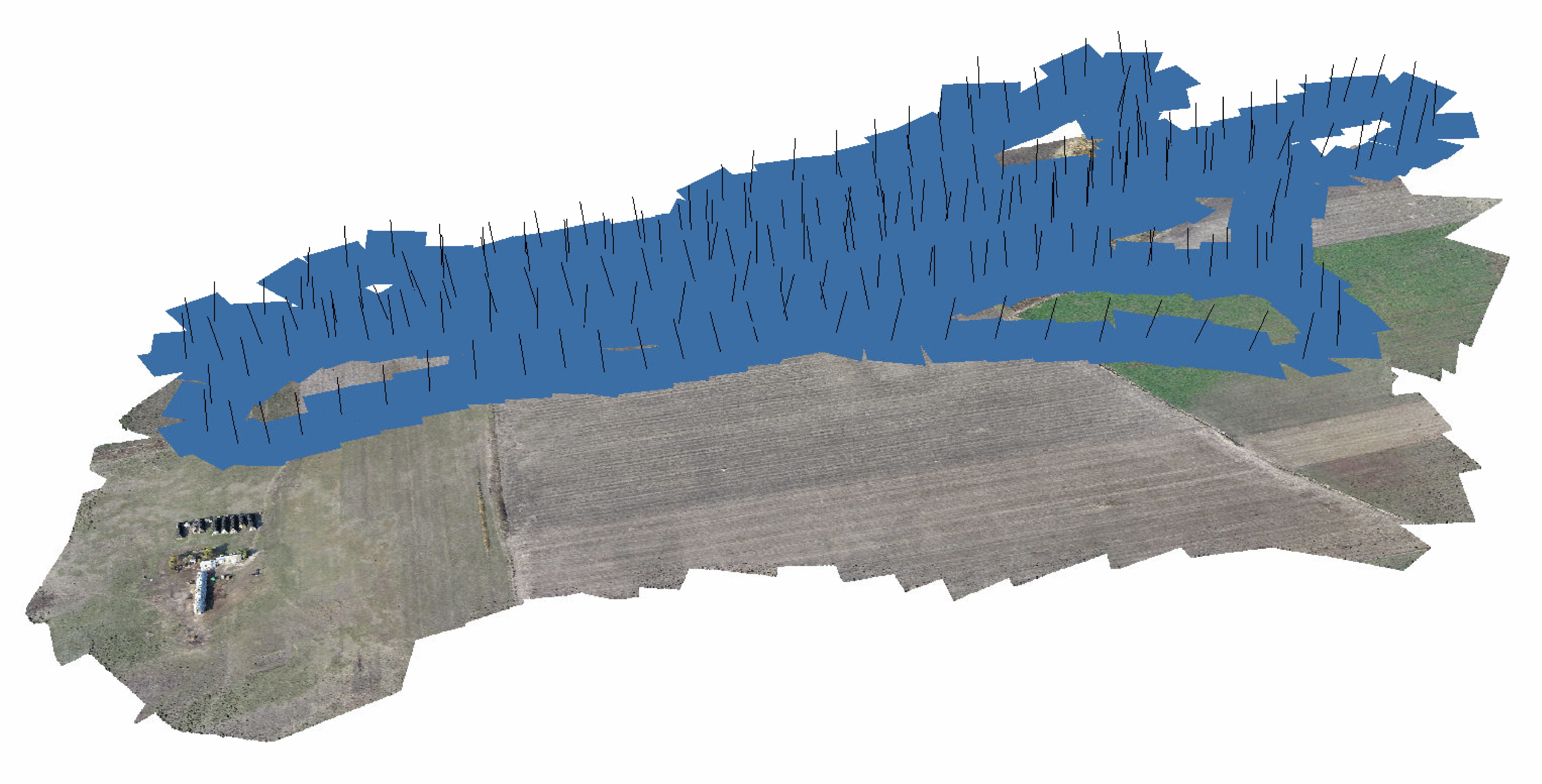
Az elkészült felvételek feldolgozása a munka egyik legfontosabb része, hiszen a látványos fotókból így lehet tudományosan is feldolgozható és elemezhető digitális állományokat előállítani. A jó eredményhez megfelelő minőségű és számú felvételekre és egy SfM algoritmuson alapuló szoftverre van szükségünk. A bronzkori földvárakról készült felvételek feldolgozásához az orosz Agisoft LLC. által készített Photoscan nevű szoftvert használtuk. Az algoritmus segítségével a program kiszámolja a kamerapozíciókat, és ebből felépíti a terület 3D pontfelhőjét, amely a valós terep leképezése.
 A program képsorozatokkal dolgozik, amelyek az adott földvár és közvetlen környezetéről, több nézőpontból készültek. A repüléseink során több magasságból is elvégeztük az útvonal repüléseket.
A program képsorozatokkal dolgozik, amelyek az adott földvár és közvetlen környezetéről, több nézőpontból készültek. A repüléseink során több magasságból is elvégeztük az útvonal repüléseket.
A repülést megelőzően ősszel nem kerültek kitűzésre egyértelműen azonosítható GCP (ground control point) pontok, így ezeket az utófeldolgozás során nem tudtuk felhasználni. A tavaszi felmérések során már ilyen azonosító pontokat is használtunk. A feldolgozás első lépcsőfoka az elkészült és az esetek többségében rendkívül nagyszámú felvételek kiválogatása (pl. homályos képek szűrése) és maszkolása (felesleges részek kitakarása). Ezt követően a program kiszámol a képek alapján egy 3D pontfelhőt (sparse point cloud). A feldolgozás következő szakaszában elkészül a poligonháló, majd erre kerül a textúra.
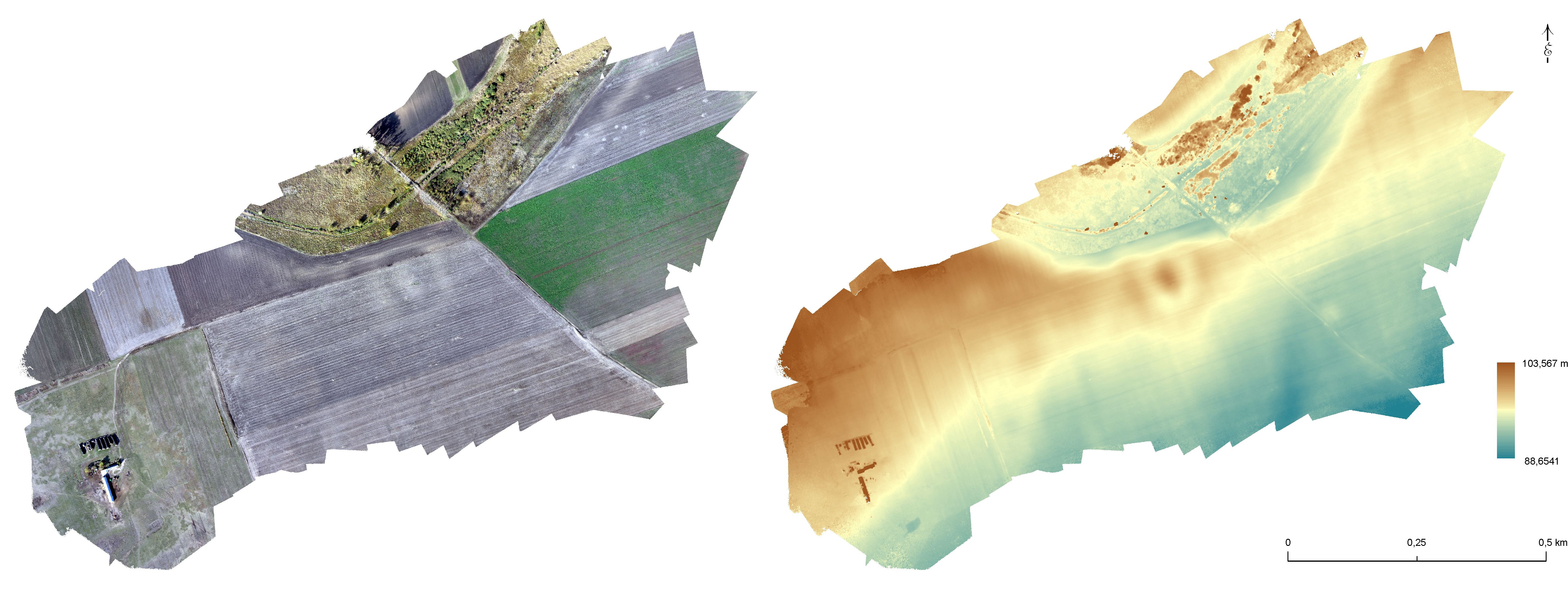
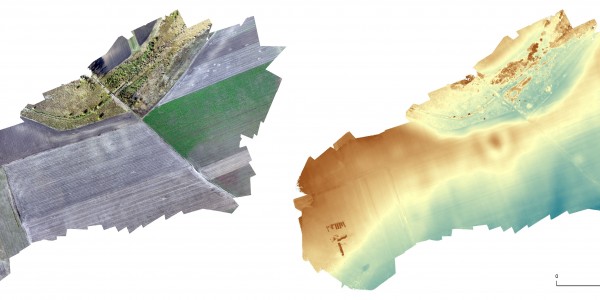
A folyamat utolsó szakaszában exportáljuk az ortofotót és a DTM-et. Az így elkészült digitális végtermékek már integrálhatóak a térinformatikai rendszerbe.
Adatok a repülésről
Repülésben és feldolgozásban részt vett személyek:
- Balogh András (Pazirik Informatikai Kft.)
- Kiss Kinga (Pazirik Informatikai Kft.)
- Pusztai Tamás (Herman Ottó Múzeum)
- Pusztainé dr Fischl Klára (Mikolci Egyetem)
- Sandó Norbert (Pazirik Informatikai Kft.)
- Schnur Tamás (Aeroart-Légikép Kft.)